Wprowadzenie do IK
Od FK do problemu odwrotnego, postawienie zagadnienia, klasyfikacja, osiągalność, singularności.
Po co właściwie potrzebujemy odwrotnej kinematyki?
Wyobraź sobie, że pokazujesz palcem punkt w przestrzeni i mówisz robotowi: „chwyć to". Człowiek robi to bez myślenia, mózg automatycznie znajduje konfigurację ramienia, dłoni i palców. Robot potrzebuje tłumacza między „gdzie ma być końcówka" a „jakie kąty muszą przyjąć przeguby", i tym tłumaczem jest właśnie algorytm kinematyki odwrotnej (IK).
Bez IK żadna z poniższych aplikacji nie działa:
Programowanie ścieżki przemysłowej
Spawanie karoserii, lakierowanie, montaż PCB. Inżynier projektuje ścieżkę w przestrzeni 3D (CAD); IK przelicza ją na sekwencję konfiguracji przegubów. Bez tego programowanie byłoby ręczne, przegub po przegubie.
Lead-through teaching
Operator prowadzi rękę cobota (np. UR, Franka) do pozycji, naciska „zapisz”. Robot zapamiętuje nie tylko pozę końcówki, ale całą konfigurację, IK jest niezbędne by odtworzyć ruch z innej startowej pozycji.
Teleoperacja / VR
Chirurg porusza joystickiem; robot da Vinci w ciele pacjenta podąża. Rękawica VR steruje awatarem. Każdy ruch dłoni → pose w SE(3) → IK robota → kąty silników. Latencja musi być < 20 ms.
Pick-and-place z wizją
Kamera wykrywa pozycję paczki na taśmie → IK liczy konfigurację → robot chwyta. Kluczowe w logistyce (Amazon, DHL) i sortowniach żywności. Wymaga IK uruchamianego setki razy na sekundę.
Animacja postaci w grach
Postać podnosi przedmiot, otwiera drzwi, opiera rękę o ścianę. Inverse Kinematics w silnikach gier (Unreal, Unity) ustawia ramię, żeby dłoń trafiła w cel, bez ręcznej animacji każdego klatki.
Robotyka kosmiczna i podwodna
Ramię na Międzynarodowej Stacji Kosmicznej (Canadarm2) albo na ROV-ie. Operator widzi tylko widok z kamery; klika punkt w przestrzeni; IK przekształca to na ruch przegubów w stanie nieważkości / pod wodą.
Każda z tych aplikacji ma własne wymagania: szybkość (gry, VR), niezawodność (medycyna), powtarzalność (przemysł). Stąd różne metody IK, i stąd ten moduł. Nie ma jednego algorytmu „najlepszego", jest algorytm najlepszy do Twojego problemu.
Czym jest PUMA 560 i dlaczego cały kurs jej używa?
Wszystkie moduły 0–7 pracują na jednym konkretnym robocie: PUMA 560. Wybór nie jest przypadkowy, to klasyczny manipulator, którego każdy podręcznik robotyki używa jako modelu referencyjnego. Krótko, dlaczego:
Krótka historia
- 1969, Victor Scheinman buduje na Uniwersytecie Stanforda „Stanford Arm" (poprzednik PUMA), pierwszy elektryczny manipulator komputerowo sterowany przeznaczony do prac montażowych.
- 1978, firma Unimation (założona przez Josepha Engelbergera, „ojca robotyki") wprowadza komercyjnie PUMA, Programmable Universal Machine for Assembly. Główny klient: General Motors, z myślą o linii montażowej.
- Lata 80.–90., dominacja na liniach motoryzacyjnych w USA i Europie. Setki tysięcy sztuk w produkcji.
- Dzisiaj, wycofana z produkcji nowych jednostek, ale pozostaje kanonicznym przykładem dydaktycznym w każdym podręczniku robotyki (Craig, Spong, Siciliano, Murray–Li–Sastry). Niemal każda praca o IK manipulatora 6-DOF pokazuje wyniki na Pumie.
Dlaczego idealna jako przykład dydaktyczny
Spełnia formę A warunku Piepera
Osie trzech ostatnich przegubów przecinają się w jednym punkcie (środek nadgarstka). Dzięki temu IK rozpada się na dwa łatwiejsze podproblemy 3-DOF: pozycja i orientacja. Da się wyprowadzić ręcznie w jeden wykład.
Geometria antropomorficzna
Bark (q₁ obrót talii, q₂ podniesienie), łokieć (q₃), nadgarstek sferyczny (q₄ q₅ q₆) odwzorowuje strukturę ludzkiego ramienia. Intuicje geometryczne z własnego ciała przekładają się 1:1 na konfiguracje robota.
8 rozwiązań na każdą pozę
shoulder L/R × elbow up/down × wrist flip/no-flip. Idealna ilustracja wielokrotności rozwiązań IK, fundamentalnej trudności, której nie da się obejść w żadnym manipulatorze 6-DOF.
Wszystkie pułapki na małym przykładzie
Singularności (oś 1 nad bazą, gimbal lock w nadgarstku), problemy wyboru gałęzi rozwiązania, ograniczenia zasięgu. Wszystko widać dla 6 osi, łatwiej niż na 7-DOF France czy redundantnych ramionach kosmicznych.
Co robimy w innych modułach: M9–M11 (dynamika, silnik DC, dobór napędów) korzystają z robota ES5 z dysertacji [Gruszka 2024], ma inną geometrię (forma B Piepera, równoległe osie q₂q₃q₄), ale algorytmy dynamiki działają identycznie. Pokazujemy więc dwa przykłady obok siebie.
Jak korzystać z tej aplikacji, mapa modułów
Aplikacja obejmuje pełen zakres przedmiotu Zasady Budowy Robotów. Wszystkie moduły wchodzą w program kursu, ale dla czytelności dzielimy je na dwa poziomy. Wiedza podstawowa to klasyczna teoria kinematyki, dynamiki i doboru napędów, w tym zakresie wymagamy pełnej biegłości (wyprowadzenia ręczne, wzory, parametry liczbowe, umiejętność rozwiązania zadania od zera). Wiedza zaawansowana to numeryczne metody IK i manipulatory wykraczające poza klasyczny warunek Piepera, oczekujemy znajomości koncepcji, umiejętności rozróżnienia rodzin metod i wskazania odpowiedniej dla danego problemu, bez konieczności implementacji szczegółów.
Wiedza podstawowa, trzon przedmiotu
Klasyczna kinematyka analityczna, dynamika odwrotna, modele silnika i pełen pipeline doboru napędów manipulatora
- 1.M0Wprowadzenie (jesteś tutaj)
- 2.M0.5Kompendium matematyczne (referencja narzędziowa)
- 3.M1Wyprowadzenie analityczne IK Pumy
- 4.M2Playground 8 rozwiązań analitycznych
- 5.M8Reprezentacje orientacji (Eulera, kwaterniony)
- 6.M7Singularności i manipulability
- 7.M9Dynamika odwrotna (Newton-Euler), wyliczenie τ
- 8.M10Silnik DC i energia napędów
- 9.M11Dobór napędów, pipeline projektowy
≈8-10 godzin lektury liniowej
Wiedza zaawansowana, rozszerzenie programu
Numeryczne metody IK na wspólnym benchmarku i analityczne rozwiązanie dla manipulatorów nieklasycznych (poza warunkiem Piepera)
- 1.M3Metody Jakobianowe (Transpose, DLS, SDLS)
- 2.M4Metody optymalizacyjne (Nelder-Mead, SQP)
- 3.M5Sieci neuronowe (MLP, MDN, IKFlow)
- 4.M6Wspólny benchmark dla wszystkich solverów
- 5.M12IK manipulatora bez warunku Piepera (UR5, ES5)
≈6-8 godzin lektury liniowej
Wszystkie moduły działają jako referencja. Wracaj do nich wybiórczo, gdy potrzebujesz konkretnego wzoru, wyprowadzenia albo przykładu liczbowego. Każdy moduł zawiera ściągę formuł na końcu i co najmniej jeden wzorzec liczbowy, który możesz sprawdzić we własnej implementacji.
Od kinematyki prostej do odwrotnej
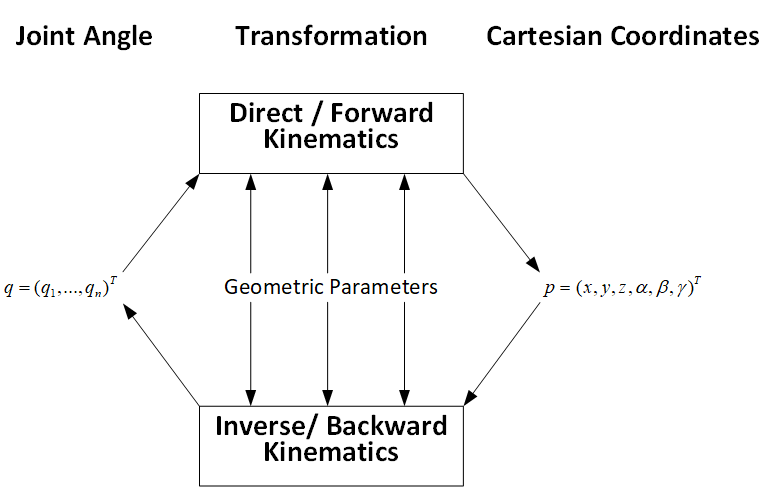
Manipulator o n stopniach swobody opisuje odwzorowanie , gdzie to przestrzeń konfiguracji (wektory wartości przegubów), a , grupa transformacji sztywnych 3D opisujących pozę efektora. Kinematyka prosta (FK) oblicza bezpośrednio z iloczynu macierzy transformacji kolejnych ogniw:
Problem odwrotny (IK) polega na wyznaczeniu takiego, że , gdzie to zadana poza. Jest on zasadniczo trudniejszy: nieliniowy, wielokrotnie zdegenerowany, a często nieposiadający rozwiązania analitycznego. Poniższy diagram zestawia obie kierunki rozumowania:
Manipulacja interaktywna, Puma560
Poniższy panel renderuje robota Puma560 z jego tabelą parametrów DH (modified / Craig). Suwaki po prawej sterują wartościami przegubów . Triady pokazują układy współrzędnych każdego ogniwa, to te same układy współrzędnych, na których opiera się każdy z solverów IK w kolejnych modułach.
Konfiguracja przegubów
Poza efektora (T₀⁶)
Nie tylko Puma, różne typy manipulatorów
Większość modułów koncentruje się na klasycznym manipulatorze przegubowym (anthropomorphic, articulated), sześć przegubów obrotowych w łańcuchu szeregowym (typowy układ Puma560, Fanuc R-2000, ABB IRB). Ale w przemyśle istnieje cała rodzina innych konstrukcji, każda z własną charakterystyką i podejściem do IK:
- SCARA (Selective Compliance Articulated Robot Arm), cztery osie, dwa pierwsze obroty w płaszczyźnie poziomej, jeden ruch wzdłuż Z, jedna rotacja narzędzia. Idealny do montażu PCB i przenoszenia.
- Delta, równoległy, trzy ramiona połączone u góry, ruch translacyjny TCP. Bardzo szybki (pick-and-place), ale małą przestrzeń roboczą.
- Kartezjański (gantry), trzy osie translacyjne, prostokątna przestrzeń robocza. IK trywialne (każda oś niezależna), ale duże gabaryty.
- Cylindryczny / sferyczny, historyczne układy, ograniczone zastosowania.

Każdy z tych typów ma specyficzne wzory IK, często znacznie prostsze niż dla Pumy. Metody iteracyjne (Jakobianowe, optymalizacyjne) z modułów 3–4 są uniwersalne, działają niezależnie od typu konstrukcji.
Kluczowe trudności IK
- Wielokrotność rozwiązań. Dla typowego przemysłowego manipulatora 6-DOF (Puma, Fanuc, ABB) istnieje do ośmiu konfiguracji osiągających tę samą pozę, shoulder L/R, elbow up/down, wrist flip. Solver musi wybrać jedną, np. najbliższą bieżącej konfiguracji.
- Osiągalność. Zbiór poz osiągalnych jest ograniczony (workspace), zadanie poza nim nie ma rozwiązania.
- Singularności. W punktach, w których jakobian traci rząd (np. przy w nadgarstku sferycznym), solver numeryczny rozbiega się albo traci stabilność; rozwiązanie zamknięte w tym miejscu jest ciągłe, ale kierunek ruchu nadgarstka staje się niejednoznaczny.
- Ograniczenia przegubowe i kolizje. Matematyczne rozwiązanie może być fizycznie nierealizowalne.
Klasyfikacja metod IK
| Kategoria | Reprezentanci | Zalety | Wady |
|---|---|---|---|
| Analityczne (zamknięte) | Pieper, Paul, PoE / Paden-Kahan, Raghavan-Roth | Dokładne, szybkie (µs), wszystkie rozwiązania | Wymagają ręcznego wyprowadzenia dla każdej rodziny robotów; trudniejsze geometrie wymagają zaawansowanych metod (rezultanty, równanie 16. stopnia) |
| Jakobianowe (iteracyjne) | Transpose, Pseudoinverse, DLS, SDLS | Dowolny robot, płynne trajektorie | Singularności, rozbieżność, lokalne minima |
| Optymalizacyjne | Nelder–Mead, SQP, CMA-ES | Dowolne cele i ograniczenia | Wolne, wrażliwe na parametry |
| Uczące się | MLP, MDN, IKFlow, diffusion | Wielomodalne, uczą się niejawnej struktury | Koszt treningu, ekstrapolacja, niepewność |
| Hybrydowe | NN→DLS warm-start, learned Jacobian | Najczęściej najlepszy kompromis w praktyce | Złożoność implementacji |
W kolejnych modułach każda z tych rodzin jest omówiona osobno, z wyprowadzeniem, implementacją referencyjną i porównaniem na tym samym zbiorze testowych poz.