Silnik DC i energia napędów
Od momentu mechanicznego τᵢ przez przekładnię harmoniczną i silnik DC do mocy chwilowej i energii cyklu transportowego.
O czym jest ten moduł
W module 9 wyznaczyliśmy wektor momentów napędowych dla zadanej trajektorii. To moment mechaniczny, siła obrotowa, którą silnik musi wytworzyć w przegubie. Tu kontynuujemy łańcuch transformacji: od momentu mechanicznego, przez przekładnię harmoniczną, do silnika DC, do mocy chwilowej, do energii pobranej w cyklu transportowym (eq. 6.23 [Gruszka, dysertacja 2024]).
Łańcuch wygląda tak:
Każdy z tych kroków wprowadza straty energetyczne, w przekładni (η_r < 1), w uzwojeniu (i²·R), w polu magnetycznym (zaniedbywane). Energia pobrana z baterii to suma:
- Mechaniczna praca przeciw grawitacji i bezwładności (zwykle 30–60% całości).
- Straty termiczne w uzwojeniu (i²·R), proporcjonalne do kwadratu prądu.
- Straty w przekładni, tarcie suche i wiskotyczne, zależne od η_r(ω, τ).
Ten model umożliwia off-line optymalizację trajektorii pod kątem zużycia energii, kluczowa metryka w przemyśle, gdzie robot wykonuje dziesiątki tysięcy cykli dziennie. Optymalizacja jest tematem rozdz. 7–8 dysertacji [Gruszka 2024].
Krok 1Przekładnia harmoniczna i jej sprawność
Manipulatory używają przekładni harmonicznych (Harmonic Drive), zwartych, lekkich, o wysokim ratio (50:1 ÷ 200:1). Konstrukcja: trzy elementy mechaniczne, sztywne circular spline (zewnętrze), elastyczne flexspline (wewnętrze), i wave generator deformujący flexspline do owalu, produkują efektywną redukcję prędkości przez „chodzące" zazębienie.
Z punktu widzenia modelu energetycznego ważne są dwie wartości:
Sprawność nie jest stała, zależy od zarówno prędkości obrotowej wału wejściowego silnika, jak i obciążenia momentu. W dysertacji aproksymowano ją wielomianem 5. stopnia z 4 krzywymi referencyjnymi (Tab. 6.4). Krzywe dla wszystkich trzech grup przegubów ES5 przedstawia poniższy rysunek:
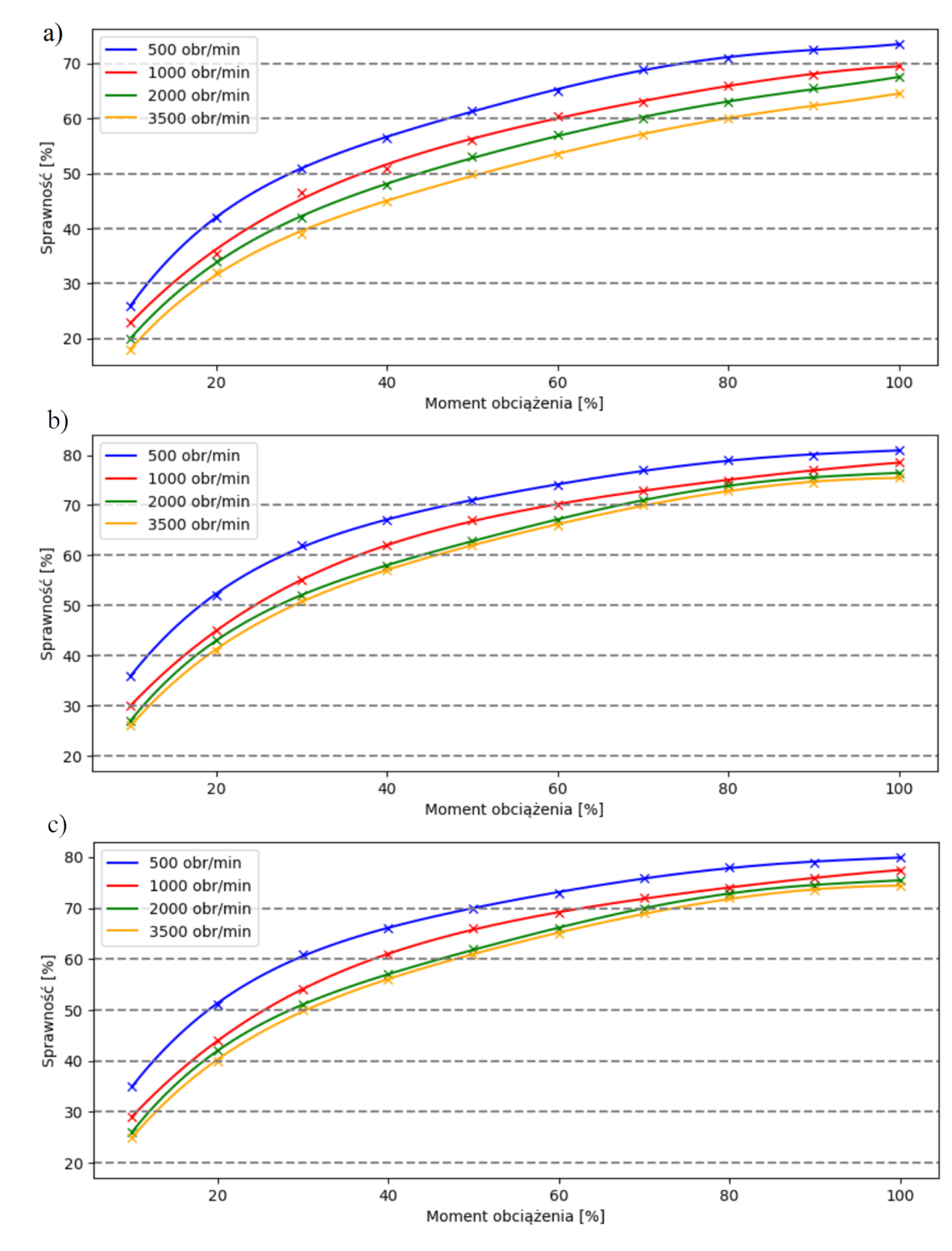
Co warto zauważyć: przy małych obciążeniach (10–20% nominalnego) sprawność spada do 25–40%, bo straty stałe (tarcie wirnika, prąd magnesujący) dominują nad pożyteczną mocą. Dla optymalnej energetycznie pracy chcemy obciążenia ~60–80% nominalnego, tu η najwyższe (60–80%). Wyższa prędkość obrotowa = niższa sprawność (różnica ~10 punktów procentowych między 500 a 3500 obr/min), straty cieplne i wibracyjne rosną z prędkością.
Krok 2Model elektromechaniczny silnika DC (eq. 6.21–6.22)
Silnik prądu stałego z magnesami trwałymi jest w pełni opisany dwoma równaniami: moment proporcjonalny do prądu oraz napięcie według prawa Kirchhoffa:
Pierwsze równanie pochodzi z prawa Ampera (siła Lorentza działająca na uzwojenie tworznika w polu magnetycznym). Drugie to bilans napięć w obwodzie wirnika: spadek napięcia na rezystancji uzwojenia + indukcyjny + siła elektromotoryczna (EMF) wirnika obracającego się w polu magnesów.
W modelu uproszczonym (quasi-statyczny) pomijamy , dla manipulatorów składowa indukcyjna stanowi zwykle <5% napięcia, bo stała czasowa elektryczna L/R ~ 1 ms vs mechaniczna 10–100 ms. Pełen model dynamiczny silnika dodawałby jeden stan (prąd) w równaniach ruchu.
Pobaw się sliderami, manipuluj parametrami i obserwuj jak zmienia się prąd, moment na wale i moc chwilowa:
Krok 3Moc chwilowa i jej składowe
Moc pobierana przez silnik z baterii to po prostu . Ten iloczyn można rozłożyć na trzy fizyczne składowe (podstawiając z eq. 6.22 i pomijając L·di/dt):
Stosując i (równość w SI), drugi człon to moc mechaniczna na wale silnika. Pierwszy człon, kwadratowo zależny od prądu, to straty cieplne w uzwojeniu.
Wniosek pedagogiczny: dla danej wymaganej mocy mechanicznej (), straty termiczne rosną kwadratowo z prądem. Dlatego silniki dimensiowane „na zapas" często mają większe i niższy potrzebny prąd, zamiast tej samej mocy mechanicznej, ale ciepło spada o czynnik k_T².
Krok 4Energia cyklu transportowego (eq. 6.23)
Energia całkowita pobrana w okresie przez wszystkie 6 napędów to suma całek mocy chwilowej:
W implementacji numerycznej: zbieramy w dyskretnych punktach czasu (dt = 10–20 ms), liczymy moc , i sumujemy trapezoidalną całkę. To bardzo proste, koszt obliczeniowy zdominowany jest przez forward+backward sweep Newton-Eulera (M9), nie przez sam model silnika.
Eksperyment optymalizacyjny, ten sam ruch (q₂ od 0 do π/3 i z powrotem) dla 4 różnych czasów trwania trajektorii:
Niemonotoniczność energii w funkcji czasu, bardzo ważna obserwacja. Zbyt szybko: rosnące ~ kwadratowo z prędkością → wysokie → ogromne straty cieplne. Zbyt wolno: dłuższe trzymanie pod grawitacją → liniowy wzrost energii statycznej. Optimum jest gdzieś pośrodku, wyznaczanie tego optimum to klasyczny problem optymalizacji jednokryterialnej.
Krok 5Ograniczenia modelu i co jeszcze warto wiedzieć
Model z eq. 6.21–6.23 jest najprostszą sensowną reprezentacją energii manipulatora, wystarczająco dokładny dla optymalizacji off-line, ale ma pewne ograniczenia, które warto znać:
- Brak rekuperacji, bierzemy bo zakładamy, że bateria/zasilacz nie odbierają mocy zwrotnej. W praktyce wiele kontrolerów robotów ma rezystory hamujące, które zamieniają ujemną moc na ciepło, z punktu widzenia poboru z sieci wynik ten sam (energia "zniknęła" w cieple).
- Stałe parametry silnika, traktujemy jako niezmienne. W rzeczywistości zależą od temperatury (uzwojenie się rozszerza, opór rośnie ~0.4%/°C dla miedzi), pola magnetycznego (saturacja przy wysokich prądach), i geometrii (wibracje, luzy).
- Brak modelu inercji wirnika silnika, pomijamy inercję samego wirnika dodaną do dynamiki przegubu. Dla dużych ratio przekładni (101:1) odbiera się jako , co dla typowego silnika BLDC daje 10–50 g·cm² = 10⁻⁴ kg·m², dla nadgarstka 5–10% rzeczywistej inercji ogniwa (odsuwa próg q̈ przy którym moment dynamiczny dominuje). Można to dodać do w module 9.
- Brak strat w sterowniku, falownik PWM ma sprawność ~95%, którą tu przyjmujemy 100%. Dla precyzyjnych pomiarów dorzucić współczynnik η_inv globalnie.
Mimo tych uproszczeń model dał w dysertacji weryfikację eksperymentalną z błędem ~5–10% względem rzeczywistego poboru energii (rozdz. 9 dysertacji), co jest świetnym wynikiem dla modelu analitycznego bez pomiarów temperaturowych ani identyfikacji online.
Ściąga formuł
Wszystkie kluczowe równania łańcucha τ → P → E zebrane razem.
Przekładnia harmoniczna mnoży prędkość kątową: silnik obraca się 101× szybciej niż przegub, ale wytwarza 101× mniejszy moment przy danej mocy.
Sprawność dzieli się, bo część energii idzie w straty (tarcie, odkształcenia flexspline). Stąd silnik musi wytworzyć więcej momentu niż wynika z czystego ratio.
Wielomian 5. stopnia w obciążeniu (% nominalnego), współczynniki z Tab. 6.4 dla 3 grup przegubów × 4 prędkości referencyjnych. Interpolacja liniowa po prędkości pomiędzy zadanymi krzywymi.
Klasyczna proporcjonalność dla silnika DC z magnesami trwałymi: siła Lorentza na uzwojenie tworznika daje moment liniowo zależny od prądu.
Prawo Kirchhoffa dla obwodu wirnika: spadek napięcia na rezystancji + człon indukcyjny + EMF wirnika. W modelu quasi-statycznym pomijamy (zwykle <5% napięcia dla manipulatorów).
Moc pobierana z baterii / zasilacza. Dla przeguba poruszającego się w kierunku siły wewnętrznej (np. opadanie ramienia) silnik mógłby teoretycznie regenerować, w naszym modelu uproszczonym bierzemy (brak rekuperacji).
Suma po wszystkich napędach × całka mocy. W praktyce numerycznie: trapezoidalna integracja z dt = 0.01–0.02 s. To jest funkcja celu w optymalizacji cyklu transportowego (rozdz. 8 dysertacji).
- Znaki τ vs ruch silnika, gdy silnik hamujeobciążenie (np. przegub opada pod grawitacją, a silnik trzyma), prąd i moment mają przeciwne znaki. może wyjść ujemne; interpretujemy to jako "energia oddawana do systemu" (rekuperacja). W naszym modelu uproszczonym bierzemy .
- Sprawność przekładni dla małych obciążeń, przy wielomian może wyjść poza [0,1]; klamrujemy do sensownego zakresu (5–95%).
- Stałe k_T i k_e, w SI mają tę samą wartość liczbową (dla silnika magnetycznego), ale podawane są w różnych jednostkach. Tab. 6.3 podaje k_T = 0.1418 Nm/A vs k_e = 0.12 V/(rad/s), różnica wynika z arbitralnego rozdziału strat między tymi stałymi w karcie producenta.
- Pomijanie L·di/dt, dla manipulatorów stała czasowa elektryczna L/R ~ 1 ms vs mechaniczna 10–100 ms, więc składowa indukcyjna zwykle <5% napięcia. Dla wysokoprędkościowych silników BLDC niemiernych w robocie może być znacząca; w pełnym modelu integrujemy di/dt jako kolejny stan.
Co dalej
Mając model energii jako funkcję trajektorii , naturalnie rodzi się pytanie: jak zaplanować trajektorię tak, żeby E było minimalne? To problem optymalizacji, ze zmiennymi decyzyjnymi w przestrzeni krzywych q(t), z ograniczeniami (limity przegubów, kolizje, czas wykonania, ograniczenia τ_max silnika), i funkcją celu .
Rozdz. 7–8 dysertacji [Gruszka 2024] pokazują takie sformułowanie z blendingiem wielomianowym n-tego rzędu jako parametryzacją trajektorii i optymalizacją wielokryterialną (czas + energia + koszt ekonomiczny). Wykraczamy tu poza zakres aplikacji edukacyjnej, zainteresowani odsyłani do pracy źródłowej.