Wyprowadzenie analityczne
Puma560 krok-po-kroku: warunek Piepera, środek nadgarstka, q₁…q₆ z geometrii i algebry.
O czym jest ten moduł
Chcemy znaleźć kąty wszystkich sześciu przegubów Pumy560 tak, aby końcówka narzędzia (TCP) znalazła się w zadanym punkcie z zadaną orientacją. Zrobimy to analitycznie, czyli podamy jawne wzory algebraiczne, bez iteracji i bez szukania numerycznego. Dla Pumy jest to wyjątkowo proste dzięki szczególnej własności geometrycznej: osie trzech ostatnich przegubów (, , ) przecinają się w jednym punkcie, środku nadgarstka. Ta własność jest jedną z form warunku Piepera (Pieper 1968).
Warunek Piepera, wystarczający, nie konieczny
W literaturze (i często w skryptach uczelnianych) pada teza, że „rozwiązanie analityczne istnieje wtedy i tylko wtedy, gdy spełniony jest warunek Piepera". To nieprawda. Pieper pokazał jedynie, że jeśli trzy kolejne osie (a) przecinają się w jednym punkcie albo (b) są wzajemnie równoległe, to istnieje rozwiązanie zamknięte z dekompozycji 3+3.
Kontrprzykłady:
- UR5/UR10 (Universal Robots), wrist nie zbiega w punkcie (przesunięcie niezerowe), więc klasyczna „forma A" Piepera nie jest spełniona. Ale q₂, q₃, q₄ są wzajemnie równoległe → spełnia formę B i ma rozwiązanie zamknięte (Hawkins 2013, Kufieta 2014).
- Manipulatory nie spełniające żadnej z form czasem także mają zamkniętą formę, przez ogólniejsze metody (Raghavan–Roth, redukcja do równania 16. stopnia). Trudniejszą geometrycznie, ale wciąż nie iteracyjną.
Praktycznie każdy 6-DOF stosowany dziś w przemyśle (Puma, Stäubli, KUKA, ABB, Fanuc, UR) ma analityczne IK, bo producenci celowo projektują geometrię, by upraszczała wyprowadzenie. Dlatego analityczne IK nie jest egzotyką ani ograniczone do archaicznych konstrukcji.
Wracając do Pumy: warunek Piepera (forma A) sprawia, że 6-wymiarowe zadanie rozpada się na dwa łatwiejsze podproblemy 3-wymiarowe, najpierw wyznaczamy , żeby środek nadgarstka trafił w odpowiednie miejsce w przestrzeni, a potem , żeby narzędzie miało żądaną orientację. Cały rachunek sprowadza się do kilku zastosowań twierdzenia cosinusów i funkcji atan2.
Pomocna metafora, Puma jako dwa „podroboty" zmontowane szeregowo
Zamiast od razu liczyć, warto na minutę spojrzeć na manipulator jako na dwa logicznie niezależne urządzenia:
- Podrobot pozycjonujący, 3-osiowe ramię (podstawa + bark + łokieć, czyli ), kończące się „kulką" w punkcie przecięcia trzech ostatnich osi. Jego jedynym zadaniem jest umieścić tę kulkę w żądanym punkcie przestrzeni.
- Podrobot orientujący, 3-osiowy nadgarstek sferyczny () zamontowany w tej samej kulce. Jego zadaniem jest obrócić narzędzie do żądanej orientacji nie ruszając kulką, bo wszystkie jego trzy osie obrotu przechodzą dokładnie przez nią.
To rozdzielenie nie jest tylko opisem, jest matematycznym faktem: pochodna pozycji wrist centre względem jest zerowa, bo obroty wokół osi przechodzących przez punkt nie przesuwają tego punktu. Dlatego można najpierw rozwiązać podproblem pozycji (3 niewiadome, 3 równania skalarne), a dopiero potem podproblem orientacji (kolejne 3 niewiadome z warunku, że pełna macierz rotacji ma być taka jak zadano). Bez tego rozdzielenia musielibyśmy jednocześnie zmagać się z układem 6 równań nieliniowych, dla którego analityczne rozwiązanie istnieje, ale jest dramatycznie bardziej skomplikowane (równanie 16-tego stopnia w metodzie Raghavana–Rotha dla geometrii nie-pieperowskich).
Geometria Pumy560 w konwencji DH (Craig)
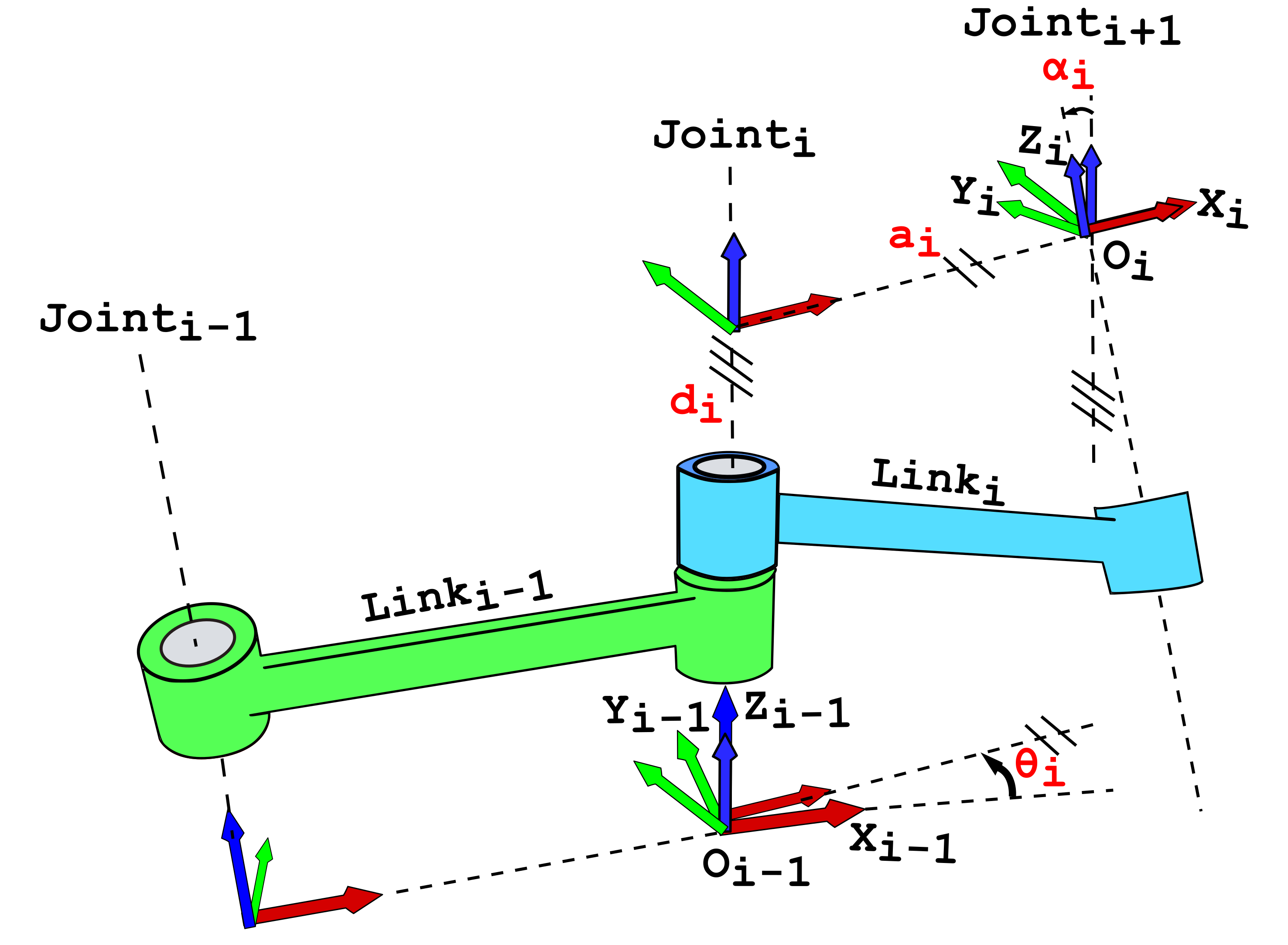
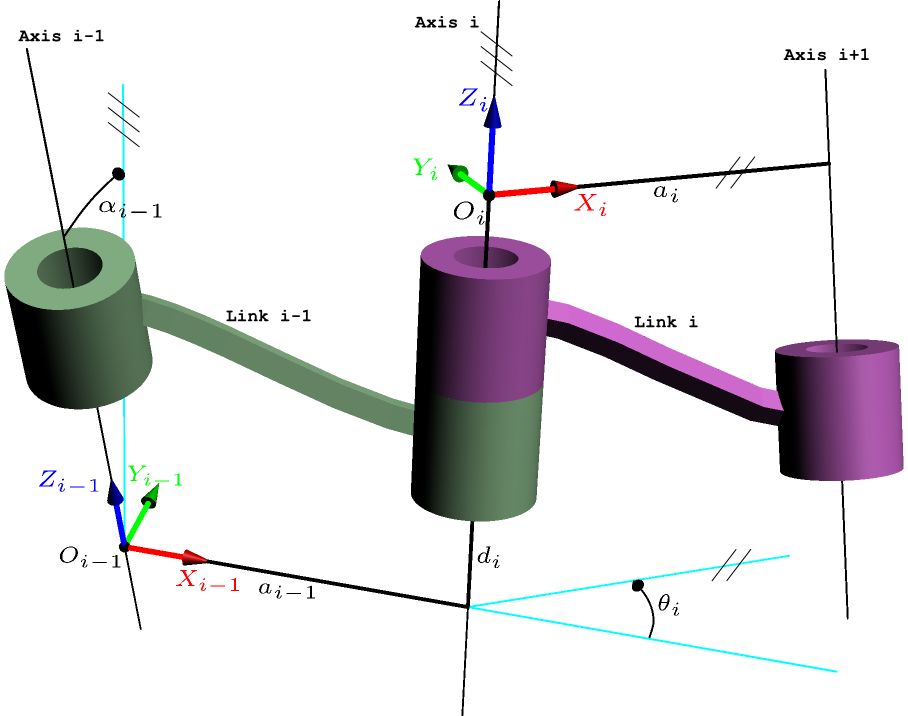
Do opisu manipulatora używamy zmodyfikowanej konwencji Denavita–Hartenberga (Craig, Introduction to Robotics, wyd. 3, rozdz. 3). Każdemu ogniwu przypisujemy własny układ współrzędnych (w literaturze angielskiej: frame, dalej krócej „układ {i}"). Przypisanie nie jest dowolne: oś musi pokrywać się z osią obrotu przegubu i, a oś leży wzdłuż wspólnej normalnej łączącej osie przegubów i−1 i i.

Cztery parametry na ogniwo, , , , , w pełni wyznaczają transformację z układu {i−1} do {i}. Intuicja geometryczna każdego z nich:
Odległość między osiami przegubów i−1 oraz i, mierzona wzdłuż ich wspólnej normalnej.
Kąt obrotu osi ẑi−1 do ẑi, obracany wokół wspólnej normalnej.
Przesunięcie początku układu {i} wzdłuż osi ẑi od wspólnej normalnej.
Kąt obrotu osi x̂i−1 do x̂i wokół ẑi. Dla przegubu obrotowego jest to zmienna konfiguracji.
Cztery elementarne transformacje składające się na T_{i−1}^{i}
Transformację z układu {i−1} do {i} można rozbić na cztery kolejne operacje wzdłuż lub wokół pojedynczej osi:. Każdy krok wprowadza jeden pośredni układ pomocniczy:




Złożenie tych czterech operacji daje pełną transformację 4×4. W praktyce piszemy od razu macierz w postaci zamkniętej (niżej), ale rozbicie na cztery kroki bywa pomocne przy derywacji i debugowaniu.
Klasyczna vs zmodyfikowana konwencja DH
W literaturze funkcjonują dwie różne wersje konwencji Denavita–Hartenberga. Różnią się miejscem przypinania układu współrzędnych do ogniwa oraz kolejnością elementarnych transformacji. Liczbowo te same parametry, ale inny indeks ogniwa, to najczęstsza pułapka przy porównywaniu wzorów z różnych książek.
| Aspekt | Klasyczna DH (1955) | Zmodyfikowana DH Craiga (1986) |
|---|---|---|
| Pozycja układu {i} | Na końcu ogniwa i (po przegubie i+1) | Na początku ogniwa i (oś = oś przegubu i) |
| Oś | Pokrywa się z osią przegubu i+1 | Pokrywa się z osią przegubu i |
| Transformacja | ||
| Indeksy parametrów | Wszystkie mają indeks i () | Mieszane: i |
| Kolejność operacji | Najpierw rotacja wokół () | Najpierw rotacja wokół () |
| Intuicja indeksu | Parametry „opisują" ogniwo i−1→i jako całość | charakteryzują ogniwo stałe, , przegub zmienny |
| Obsługa manipulatorów rozgałęzionych | Trudna (indeks i zbiera parametry dwóch różnych ogniw) | Naturalna (parametry jednoznacznie przypisane do linku) |
Jak to wpływa na IK? Dla tego samego fizycznego robota liczby są takie same, ale ich przypisanie do indeksów różni się o jeden. Jeśli wyprowadzasz rozwiązanie analityczne, pilnuj której książki używasz, wzory Craiga (które stosujemy w tym module) nie pasują dosłownie do tabeli DH z Siciliano/Khatib bez reindeksacji.
W tym module i w całej aplikacji używamy zmodyfikowanej konwencji Craiga, głównie dlatego, że dla Pumy560 ma ona najkrótsze i najczytelniejsze wzory (tabela α_{i-1} kończy się zerami i , co od razu upraszcza iloczyny macierzy). Wybór ma jednak charakter notacyjny, to nie jest „jedyna poprawna" konwencja.
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 |
to długość ramienia (upper arm), to długość przedramienia (forearm). Dodatkowo w Pumie występują dwa niezerowe odsadzenia: (odsadzenie przedramienia od osi ramienia, ok. 12,5 cm) oraz (mały bok łokcia, ok. 2 cm). Te odsadzenia są źródłem większości komplikacji w wyprowadzeniu, bez nich Puma sprowadzałaby się do klasycznego planarnego manipulatora 2R.
Transformacja ogniwa zapisana w konwencji zmodyfikowanej:
gdzie , itd. Mnożąc kolejne takie macierze, dostaniemy , pełne przekształcenie z bazy do układu efektora.
Co fizycznie robi każdy z sześciu przegubów
Zanim zanurzymy się w algebrę, ułóżmy w głowie obraz tego, jak ramię „pracuje". Każdy przegub Pumy ma jedną dokładnie wyznaczoną funkcję mechaniczną, i dla każdej istnieje codzienna analogia, która ułatwia zapamiętanie. To krótkie wprowadzenie zwraca się z nawiązką, gdy później pojawi się pytanie „dlaczego kontroluje wysokość, a nie".
Decyduje wyłącznie o azymucie, w którą stronę świata zwrócone jest ramię. Nie zmienia ani wysokości, ani wysunięcia TCP, jedynie obraca całą resztę manipulatora. Z perspektywy IK: ten staw widzimy w „rzucie z góry", bierzemy docelowej pozycji i pytamy: w którą stronę ramię musi się skręcić, żeby w ogóle „móc patrzeć" na cel.
Wraz z kontroluje punkt 2D, w który sięga końcówka ramienia (wysokość + wysunięcie radialne), w płaszczyźnie pionowej wyznaczonej już przez . Czysto „pionowy" stopień swobody barku.
Decyduje o „rozłożeniu" całego ramienia: im bardziej wyciągnięte, tym dalej sięga; im bardziej zgięte, tym wyżej/bliżej. Geometrycznie odpowiada za długość przekątnej bark→wrist center (poprzez prawo cosinusów, patrz krok 4). Tutaj pojawia się słynna dwuznaczność „elbow up / elbow down".
Pierwszy z trzech stawów nadgarstka. Nie zmieniapozycji środka nadgarstka, bo oś obrotu przechodzi dokładnie przez ten punkt. Wpływa za to na orientację, to właśnie ten staw „skręca" całą głowę nadgarstka wokół przedramienia.
Kąt ataku narzędzia względem osi przedramienia. Gdy , narzędzie jest „wyciągnięte" w jednej linii z przedramieniem, wówczas występuje gimbal lock: osie i pokrywają się i tracą niezależność.
Końcowy stopień swobody, orientuje narzędzie wokół jego własnej osi po tym, jak ustawiły kierunek, w który narzędzie „patrzy". Bez robot mógłby tylko wskazywać kierunek; z nim, może też ustawić orientację gripper'a, szczęk czy dyszy.
Dlaczego trzy + trzy? Trzy pierwsze stawy () ustalają pozycję 3-wymiarowego punktu (środek nadgarstka), bo 3 niewiadome wystarczają, żeby opisać dowolny punkt w . Trzy ostatnie () ustalają orientację w przestrzeni, bo grupa obrotów jest również 3-wymiarowa. To nie przypadek, to inżynierski projekt optymalizujący liczbę stopni swobody pod konkretne zadanie: ustawić narzędzie w pełnej dowolności w przy możliwie najprostszej geometrii.
Laboratorium
Po lewej: manipulator, którym sterujesz ręcznie sześcioma suwakami, służy do generowania dowolnych poz testowych. Po prawej: pole pozy docelowej z przyciskiem „zrzut z kontrolera", który kopiuje aktualne robota jako cel IK. Wszystkie wartości pośrednie w kolejnych krokach przeliczane są na bieżąco, zmiana pozy celu od razu aktualizuje liczby poniżej.
Konfiguracja przegubów
Poza efektora (T₀⁶)
Poza docelowa T*
Krok 0Odseparowanie pozycji od orientacji (dekompozycja wristowa)
Zadana poza efektora to macierz transformacji jednorodnej , górne to orientacja (macierz rotacji ), a ostatnia kolumna to pozycja :
Zbiór to zbiór wszystkich takich macierzy, grupa sztywnych przesunięć i obrotów w przestrzeni. Szukamy wektora kątów spełniającego , gdzie to odwzorowanie FK (kinematyka prosta).
Obserwacja kluczowa: obroty w przegubach 4, 5, 6 dzieją się wokół osi przecinających się w jednym punkcie (środku nadgarstka ). Obrót wokół osi przechodzącej przez punkt nie przesuwa tego punktu. Wobec tego położenie nie zależy od, zależy tylko od .
W konwencji Craiga dla Pumy zachodzi , więc środek nadgarstka pokrywa się z początkiem układu {6}. Jeśli dodatkowo nie ma offsetu narzędzia, środek nadgarstka to po prostu pozycja efektora:
Gdy jest narzędzie (pewien stały offset między układem {6} a układem TCP), cofamy się o ten offset:
Reasumując plan: najpierw znajdziemy z pozycji środka nadgarstka (3 równania, 3 niewiadome), potem z warunku, że orientacja pozostałych trzech przegubów ma domknąć zadane .
const T06 = options.toolOffset
? mul4(target, invSE3(options.toolOffset))
: target;
const R = extractRotation(T06); // górne 3×3
const [px, py, pz] = extractPosition(T06); // ostatnia kolumnaKrok 1Wzór na pozycję środka nadgarstka
Pozycja początku układu {4} (czyli środka nadgarstka) w bazie to ostatnia kolumna iloczynu czterech macierzy . Wstawiając parametry z tabeli DH (patrz wyprowadzenie poniżej), otrzymujemy:
gdzie , , , .
▸ Pokaż pełne wyprowadzenie iloczynu T04
Każda w konwencji Craiga ma postać podaną wyżej. Dla Pumy 560 podstawiamy z tabeli DH:
(, więc tylko obrót wokół z).
().
().
Przy szukaniu pozycji środka nadgarstka (pierwsze 3 elementy ostatniej kolumny ) nie potrzebujemy : wystarczy „adres" początku układu {4}, czyli punkt wyrażony w bazie. Liczymy więc krócej:
gdzie ostatnia transformacja sprowadza się do obrotu wokół x i przesunięcia o w x i w z.
Wymnażając kolejno: najpierw daje przesunięcie łokcia o obrócone przez , potem obraca to wokół osi x o i dodaje przegub , finalnie obraca całość wokół pionowej osi bazy. W rezultacie dostajemy podane wyżej , z efektywną długością przedramienia rozłożoną na składowe w „radialnym" kierunku oraz w pionie.
Zauważmy, że w pierwszych dwóch równaniach powtarza się to samo wyrażenie w nawiasie. Wprowadźmy skrót:
Geometrycznie to radialna odległość środka nadgarstka od pionowej osi bazy w obróconym o układzie, innymi słowy, „jak daleko" wrist centre jest od pionowej osi obrotu barku.
Z dwóch pierwszych równań mamy i . Są to składowe obrotu o kąt wektora w płaszczyźnie XY:
Mnożąc obie strony tej równości przez (transpozycja = inwersja, bo macierz obrotu jest ortogonalna) i odczytując:
Podnosząc oba równania do kwadratu i dodając, lewa strona daje , a prawa = po rozwinięciu i uproszczeniu (krzyżowe wyrazy się znoszą, ) . Stąd kluczowa identyczność:
Ta równość jest fundamentem całej dekompozycji. Lewa strona zależy wyłącznie od zadanych (wiemy je), prawa strona zawiera tylko . Dlatego wyliczamy natychmiast, bez znajomości .
# T_target: macierz 4x4 (poza efektora), np. NumPy array.
# R = T_target[:3, :3], p = T_target[:3, 3]
import numpy as np
R = T_target[:3, :3]
p = T_target[:3, 3]
# Środek nadgarstka: cofamy się o d6 wzdłuż osi z układu 6.
# Dla Pumy d6 = 0, więc p_wc == p, ale piszemy ogólnie:
p_wc = p - D6 * R[:, 2]
px_w, py_w, pz_w = p_wcKrok 2Wyznaczenie q₁, dwie gałęzie barku
Intuicja: cień TCP na podłodze
Wyobraź sobie, że nad TCP świeci pionowa lampa rzucająca cień na poziomą płaszczyznę podstawy. Ten cień ma w bazie współrzędne . Naturalna pierwsza myśl: obrót podstawy musi po prostu skierować ramię w stronę cienia, czyli .
Dla manipulatora bez odsadzenia tak właśnie by było. Puma ma jednak , boczne odsunięcie osi przedramienia od osi ramienia. Skutkiem tego, gdy bark obraca się o kąt , przedramię (a w konsekwencji środek nadgarstka) nie znajduje się ściśle przed barkiem, leży lekko obok, w bok od osi ramienia o stałą odległość .
Z perspektywy „cienia na podłodze" oznacza to, że cień nie leży dokładnie na linii barku, jest przesunięty w bok. Stąd potrzeba drugiego członu: . Pierwszy atan2 wskazuje na cień, drugi koryguje o ten boczny offset (dla typowych pozycji ~7°). Te 7° to dokładnie błąd, jaki popełniają studenckie kody, w których pominięto drugi człon.
Geometrycznie: wektor () w obróconym układzie ramienia to ten sam wektor co () w bazie, tylko obrócony o . Wektor () ma nachylenie względem osi ramienia, a wektor () ma nachylenie względem osi X bazy. Różnica tych dwóch nachyleń to właśnie kąt obrotu między układami, czyli .
Z identyczności kroku 1 wyznaczamy , ale z dokładnością do znaku (bo pierwiastek kwadratowy daje dwie wartości):
Jeśli , zadanie jest nieosiągalne, cel leży w „zakazanym" cylindrze o promieniu wokół pionowej osi bazy. W pozostałych przypadkach znak wyznacza, czy bark Pumy zwraca się w kierunku celu (shoulder right, ), czy odwrotnie, o obrócony (shoulder left, ). Obie konfiguracje dają identyczną pozycję wrist centre, stąd „gałąź" w algorytmie.
Mając i , rozwiązujemy układ dwóch liniowych równań w z poprzedniej strony:
Formalnie rozwiązujemy go przez wyznacznik, ale ładniej zapisuje się to przez różnicę dwóch funkcji atan2, jest różnicą kąta do celu () i kąta „w bok" o odsadzeniu :
# ρ, promień rzutu wrist centre na płaszczyznę xy bazy.
# Dwa znaki dają shoulder LEFT i RIGHT.
r_xy_sq = px_w**2 + py_w**2
disc_q1 = r_xy_sq - D3**2
if disc_q1 < 0:
return [] # cel poza "cylindrem zakazanym"
rho_abs = np.sqrt(max(0.0, disc_q1))
phi = np.arctan2(py_w, px_w)
solutions = []
for shoulder_sign in (+1, -1): # +1 = right, -1 = left
rho = shoulder_sign * rho_abs
q1 = phi - np.arctan2(D3, rho)
# ... dalej q3, q2, q4-q6 dla tej gałęziDwuargumentowa funkcja atan2(y, x), w odróżnieniu od zwykłego arctan(y/x), zwraca kąt na pełnym przedziale , uwzględniając znaki obu argumentów. To ważne: zwykły arctan traci informację o ćwiartce, przez co „widzi" kąty z góry i z dołu jako identyczne.
Częsty błąd w kodach studenckich: użycie atan2(py, px) bez drugiego członu atan2(d₃, ρ). Dla Pumy daje to stały błąd rzędu 7° , odpowiadający kątowi „w bok" wymuszonemu przez odsadzenie .
const phi = Math.atan2(py, px); // kąt do celu w XY
const rho = rhoSign * Math.sqrt(px*px + py*py - D3*D3); // ±
const q1 = phi - Math.atan2(D3, rho); // q₁ na obu gałęziachKrok 3Przejście do 2-wymiarowej płaszczyzny ramienia
Po wyznaczeniu obracamy cały układ o ten kąt wokół pionowej osi bazy. W tak obróconym układzie całe ramię robota leży w jednej pionowej płaszczyźnie, oznaczmy jej współrzędne jako , gdzie to odległość od pionowej osi bazy (dodatnia po „stronie" celu), a , wysokość nad płaszczyzną podstawy.
W tej płaszczyźnie zostało nam zadanie 2-wymiarowe: połączyć bark ze środkiem nadgarstka za pomocą dwóch ogniw, ramienia o długości i przedramienia o pewnej efektywnej długości , z łokciem gdzieś pomiędzy.
Czym jest ? Początek układu {4} (wrist centre) nie leży na prostym przedłużeniu ramienia, jest przesunięty względem łokcia o dwa składowe: wzdłuż osi X układu {3} (mały bok, ok. 2 cm) i wzdłuż osi Z układu {3} (długi, ok. 43 cm). Skąd ta konstrukcja? Fizycznie wynika z tego, że silnik napędzający przedramię musi się gdzieś zmieścić obok łokcia, więc geometrycznie przedramię jest „schowane" za mały boczny segment.
W płaszczyźnie ramienia wektor od łokcia do środka nadgarstka ma długość:
i jest odchylony od osi X układu {3} o stały kąt:
O tym odchyleniu pamiętamy przy obliczaniu w następnym kroku.
Diagram przedstawia planarny podproblem 2R: bark (niebieski) i środek nadgarstka (czerwony) leżą w jednej płaszczyźnie pionowej, obróconej o q₁ wokół osi bazy. Dwie gałęzie, zielona (elbow up) i pomarańczowa (elbow down), pokazują alternatywne położenia łokcia (pełna linia = ramię a₂, linia przerywana = efektywne przedramię L). Promień D = odległość bark–wrist (fioletowa przerywana) wchodzi do prawa kosinusów w kroku 4.
Krok 4Wyznaczenie q₃, twierdzenie cosinusów, dwie gałęzie łokcia
Dlaczego q₃ daje się wyznaczyć osobno, niezmiennik odległości
Kluczowa obserwacja, która sprawia, że można w ogóle w tym momencie szukać w izolacji od reszty: odległość |bark → wrist center| nie zależy od ani , zależy wyłącznie od .
Intuicyjnie: i obracają cały trójkąt bark-łokieć-wrist jako sztywne ciało, pierwszy wokół pionowej osi bazy, drugi wokół osi barku. Obroty sztywne nie zmieniają długości żadnego boku trójkąta. To, co zmienia wewnętrzny kształt trójkąta, a w szczególności długość przekątnej bark↔wrist, to wyłącznie zgięcie w łokciu, czyli .
Stąd ważny wniosek metodologiczny: mając zadaną pozycję wrist centre (a więc znaną przekątną ), możemy natychmiast wyłuskać z jednego równania skalarnego, nie wiedząc jeszcze ile wynosi . Dopiero potem wrócimy do dwuwymiarowego problemu i wyznaczymy , traktując kształt trójkąta jako już ustalony. To dlatego algorytm liczy stawy w kolejności , a nie w kolejności indeksów.
Spojrzenie geometryczne. W płaszczyźnie ramienia bark , łokieć i środek nadgarstka tworzą trójkąt z trzema znanymi długościami: (ramię), (efektywne przedramię) i (przekątna bark→wrist). Każdy trójkąt o danych trzech bokach ma jednoznacznie wyznaczone wszystkie kąty wewnętrzne, w szczególności kąt przy łokciu:
Trzy znane długości, a₂ (ramię), L (efektywne przedramię, L = √(a₃² + d₄²)), D (odległość bark↔nadgarstek, D = √(ρ² + p_z²)), domykają trójkąt. Wewnętrzny kąt γ przy łokciu wynika wprost z prawa cosinusów. Drugie rozwiązanie (elbow ↑ vs ↓) odpowiada odbiciu trójkąta względem boku D, znak sin γ przy rekonstrukcji γ = atan2(±sin γ, cos γ).
Obraz pomocniczy, naprężona linka i dwa lustrzane trójkąty
Wyobraź sobie naprężoną linkę o długości , której końce są przymocowane w barku i w środku nadgarstka . Łokieć jest swobodnym przegubem o ustalonej odległości od barku i od wrist, może „opaść" po dowolnej stronie linki. Daje to dwa identycznie wymierzone trójkąty będące względem siebie lustrzanym odbiciem przez bok :
- elbow up, łokieć powyżej linii bark↔wrist, ramię „zgięte w górę" jak u człowieka podnoszącego rękę.
- elbow down, łokieć poniżej, ramię „złożone w dół" jak u robota chwytającego coś z poziomu stołu.
Obie konfiguracje dają dokładnie tę samą pozycję wrist centre, ale wymagają różnych . Stąd binarny wybór znaku w wyrażeniu na , to przełącznik między dwoma lustrzanymi obrazami tego samego trójkąta.
Z prawa cosinusów (zastosowanego do boku przeciwległego kątowi ):
Pełny kąt wewnętrzny trójkąta wyciąga się standardowo przez atan2 (a nie acos), żeby zachować informację o znaku :
Znak przed odpowiada wyborowi elbow up (łokieć powyżej linii bark↔wrist) lub elbow down (poniżej), dwa odbicia trójkąta względem boku .
Powiązanie z q₃. Kąt przy łokciu nie jest tożsamy z . Gdyby przedramię biegło dokładnie wzdłuż osi (czyli ), wówczas . W Pumie jednak przedramię jest „odchylone" od osi o stały kąt (z kroku 3), więc:
▸ Pokaż równoważne wyprowadzenie algebraiczne (z dwóch równań pozycji)
Biorąc dwie zależności z kroku 1, i , podnosimy oba do kwadratu i dodajemy. Wyrazy z i składają się w sumę kątów , podobnie . Po uproszczeniu:
Oznaczając lewą stronę (znaną) przez :
Wyrażenie to liniowa kombinacja sinusa i cosinusa o tym samym argumencie, można ją zapisać jako jeden cosinus z przesuniętym kątem:
(sprawdź: rozwijając prawą stronę przez i podstawiając , , obie strony się zgadzają).
Stąd , więc , i:
Spójność z wyprowadzeniem geometrycznym: (różnica znaku wynika z definicji kąta), więc , czyli , ten sam wynik.
Postać końcowa (wykorzystywana w kodzie, jeden atan2 zamiast łańcucha kątów):
Znak odpowiada dwóm gałęziom geometrycznym, łokieć „w górę" lub „w dół". Gdy , cel leży poza zasięgiem ramienia dla danej gałęzi barku, kombinacja shoulder+elbow nie ma rozwiązania (trójkąt o takich bokach nie istnieje, bo nie spełnia nierówności trójkąta).
# Wewnątrz pętli po shoulder_sign:
K = (rho**2 + pz_w**2 - A2**2 - A3**2 - D4**2) / (2 * A2)
L = np.sqrt(A3**2 + D4**2)
beta = np.arctan2(D4, A3)
disc = L**2 - K**2
if disc < 0:
continue # cel poza zasięgiem
sqrt_d = np.sqrt(disc)
for elbow_sign in (+1, -1): # +1 = up, -1 = down
q3 = np.arctan2(elbow_sign * sqrt_d, K) - beta
# ... dalej q2, q4-q6 dla tej gałęziKrok 5Wyznaczenie q₂, 2×2 układ liniowy w cosinusach
Mając już znane , wracamy do dwóch równań pozycji z kroku 1, tym razem traktując jako jedyną niewiadomą. Składowe radialna i pionowa to:
Stosujemy wzory na sumę kątów: oraz . Wstawiając do pierwszego równania:
Grupujemy wyrazy przy i osobno:
Tak samo dla : . Wprowadzając skróty na powtarzające się grupy:
(zauważ: zależą tylko od znanego i stałych DH), oba równania zapisują się zwarto jako układ liniowy 2×2:
Wyznacznik macierzy współczynników: . Z reguły Cramera (lub bezpośrednio przez inwersję 2×2):
Wyznacznik znika tylko, gdy jednocześnie , niemożliwe dla fizycznego manipulatora. Mając i jednocześnie, kąt wyznacza atan2:
# Wewnątrz pętli po elbow_sign (q3 znane):
c3, s3 = np.cos(q3), np.sin(q3)
M = A2 + A3 * c3 - D4 * s3
N = A3 * s3 + D4 * c3
denom = M**2 + N**2
c2 = (M * rho - N * pz_w) / denom
s2 = (-M * pz_w - N * rho) / denom
q2 = np.arctan2(s2, c2)Dlaczego nie q₂ = arcsin(s₂) lub arccos(c₂)? Każda z tych funkcji zwraca wartość tylko z połowy okręgu, tracimy informację o znaku drugiego składnika. atan2(s, c) używa znaków obu argumentów, dając jednoznaczny kąt na całym okręgu . Klasyczny błąd implementacyjny: „policz arctan(s/c) i zgadnij ćwiartkę po znakach", działa tylko po stronie poprawnie pamiętających autorów.
Krok 6Przejście od pozycji do orientacji, macierz R₃⁶
Do tego momentu zajmowaliśmy się pozycją środka nadgarstka. Teraz przechodzimy do orientacji: trzy ostatnie przeguby muszą obrócić nadgarstek tak, aby pełna macierz zgodziła się z zadanym .
Część rotacyjną macierzy , czyli , wyliczamy ze znanych już . Kluczowa obserwacja: w konwencji Craiga i obracają się wokół tej samej (poziomej) osi , bo w tabeli DH (między układami {2} i {3} nie ma skręcenia osi). Obroty wokół wspólnej osi zwyczajnie się dodają: . Razem:
▸ Pokaż jawne mnożenie trzech macierzy 3×3
Krok 1, pomnóżmy :
(mnożenie wiersz·kolumna; ma , stąd druga i trzecia kolumna).
Krok 2, pomnóżmy z wynikiem powyżej:
Pierwszy wiersz: .
Po uproszczeniu wszystkich trzech wierszy:
Sprawdzenie ortogonalności: każdy wiersz ma normę , a iloczyn skalarny pierwszych dwóch wierszy: . Zgodnie z oczekiwaniem dla macierzy obrotu.
Wynik jawny (przepisany dla wygody, używamy go bezpośrednio w kodzie):
Dalej: jeśli , to nadgarstek musi dostarczyć „brakującą" rotację:
Równość wynika z ortogonalności macierzy rotacji (wiersze są ortonormalne). W implementacji liczymy więc po prostu iloczyn transponowanej macierzy przez , bez wywoływania numerycznej inwersji.
# Wewnątrz pętli po elbow (q2, q3 znane):
c1, s1 = np.cos(q1), np.sin(q1)
c23 = np.cos(q2 + q3)
s23 = np.sin(q2 + q3)
R03 = np.array([
[ c1*c23, -c1*s23, -s1],
[ s1*c23, -s1*s23, c1],
[-s23, -c23, 0],
])
R36 = R03.T @ R # ortogonalność: T zamiast invKrok 7Ekstrakcja q₄, q₅, q₆ z macierzy R₃⁶
Trzy ostatnie ogniwa Pumy to klasyczny nadgarstek typu ZYZ: dwa skręcenia osi między kolejnymi przegubami sprawiają, że osie , , są wzajemnie prostopadłe i schodzą się w jednym punkcie (środek nadgarstka). Z tabeli DH (, , ), iloczyn:
Skąd dokładnie te pięć macierzy?, rozbicie iloczynu na cegiełki DH
Część rotacyjna każdej macierzy DH (Craig) ma postać , najpierw skręcamy poprzednią oś o stały kąt (geometria ogniwa), potem obracamy o zmienną wokół nowej osi (kąt przegubu). Sklejając trzy ostatnie ogniwa, dostajemy:
Pierwsza cegiełka to czyste bo skręcenie zostało już „pochłonięte" w macierzy . Pozostałe dwie pary biorą skręcenia z tabeli DH, (oś obraca się o 90° aby pokryć się z osią prostopadłą do przedramienia) oraz (oś wraca o 90° w przeciwną stronę, aby oś wskazywała wzdłuż narzędzia). Stąd „kanapka" z–x–z–x–z: trzy obroty przegubowe przeplatane dwoma stałymi „skręceniami montażowymi" .
Dlaczego to się nazywa „typ ZYZ"? Bo gdy odpowiednio przenieść stałe macierze przez obroty (korzystając z tożsamości ), cała kanapka redukuje się do , klasycznych kątów Eulera ZYZ. Konwencja DH wymusza zapis przez i , ale geometria pod spodem to dokładnie te same trzy obroty z–y–z, których uczy się w kinematyce ciała sztywnego.
ma klasyczną postać macierzy ZYZ: środkowy obraca wokół osi prostopadłej do osi i , więc środkowy element całej macierzy to , a środkowy wiersz/kolumna kodują . Po wymnożeniu:
Element środkowego wiersza daje nam z dokładnością do znaku . Pozostałe elementy średniej kolumny i wiersza rozszyfrowują i :
Ponieważ występuje w każdej równości osobno, a może być dodatni lub ujemny, dostajemy dwie gałęzie nadgarstka (no-flip i flip). Dla :
Skąd ten pierwiastek?, jedynka trygonometryczna w działaniu
Mamy już , to wystarczyłoby do policzenia przez acos, ale dwa istotne powody każą sięgnąć po atan2: (1) tracimy informację o znaku sinusa, więc nie odróżnimy gałęzi no-flip od flip; (2) acos jest źle uwarunkowany w pobliżu (małe błędy zaokrąglenia → duże błędy kąta). Dlatego rekonstruujemy także .
Z dwóch równości z pierwszej kolumny środkowego wiersza:
Podnosimy do kwadratu i dodajemy, korzystając z jedynki trygonometrycznej :
Stąd , znak jest fundamentalnie nierozstrzygalny z tych równań (układ trzech równań na trzy niewiadome ma dwie gałęzie rozwiązań). Mając parę , składamy:
Bonus geometryczny: w nadgarstku typu ZYZ to długość rzutu osi narzędzia na płaszczyznę prostopadłą do . Gdy ta długość maleje do zera, osie i stają się współliniowe, pojawia się osobliwość nadgarstka opisana niżej.
(górne znaki, gałąź no-flip, dolne, flip).
Osobliwość (singularność) nadgarstka (q₅ ≈ 0)
Gdy , dwa końcowe obroty nadgarstka zachodzą wokół tej samej osi. Matematycznie wyzerowuje się cała średnia kolumna i średni wiersz (poza ), a w macierzy pozostaje tylko rotacja sumaryczna . Tracimy stopień swobody: pojedynczy kąt albo z osobna jest nieokreślony, wyznaczona jest tylko ich suma.
W kodzie detekujemy to przez obliczenie . Gdy ta liczba jest mniejsza niż ustalona tolerancja, wybieramy umownie i resztę dopasowujemy tak, by orientacja docelowa była zachowana.
# R36 znane z kroku 6. Indeksy (row, col), 0-based.
sq5_abs = np.hypot(R36[1, 0], R36[1, 1])
if sq5_abs < EPS: # singularność nadgarstka
# tylko (q4 + q6) jednoznaczne, wybieramy q4 = 0
q5 = np.arctan2(0.0, R36[1, 2])
q4 = 0.0
q6 = np.arctan2(-R36[0, 1], R36[0, 0])
solutions.append((q1, q2, q3, q4, q5, q6))
else:
for wrist_sign in (+1, -1): # +1 = noflip, -1 = flip
q5 = np.arctan2( wrist_sign * sq5_abs, R36[1, 2])
q4 = np.arctan2( wrist_sign * R36[2, 2], -wrist_sign * R36[0, 2])
q6 = np.arctan2(-wrist_sign * R36[1, 1], wrist_sign * R36[1, 0])
solutions.append((q1, q2, q3, q4, q5, q6))Krok 8Osiem rozwiązań, enumeracja i selekcja praktyczna
W trzech miejscach podejmowaliśmy decyzję „znak czy ":
- shoulder, znak (krok 2),
- elbow, znak (krok 4),
- wrist, znak (krok 7).
Trzy niezależne wybory binarne dają kombinacji , dlatego typowo dla Pumy mamy do ośmiu różnych konfiguracji osiągających tę samą pozę efektora. W praktyce bywa mniej: jeśli dyskryminant łokcia wyjdzie ujemny, odrzucamy paręshoulder+elbow; jeśli natrafimy na singularność nadgarstka, dwie gałęzie wrist zlewają się w jedną.
Który z tych ośmiu wyników wybrać? Sam algorytm IK tego nie rozstrzyga, selekcja to osobny krok planowania ruchu. Najczęściej stosowane kryteria:
- Najbliższy aktualnej konfiguracji, minimalizacja ruchu przegubów, z uwzględnieniem zawinięcia kątów (bo i to mechanicznie różne położenia, a matematycznie ten sam kąt).
- W granicach przegubowych, niektóre teoretyczne rozwiązania mogą być fizycznie nieosiągalne.
- Z dala od singularności, wartość manipulacyjności (patrz moduł 7) jako dodatkowe kryterium.
- Bez kolizji, sprawdzenie zewnętrznym kolizją checker.
Poniżej miniatury wszystkich rozwiązań dla aktualnej pozy . Kliknięcie ładuje konfigurację do głównego kontrolera powyżej, efektor pozostaje w tym samym miejscu, a ramię robota przybiera drastycznie różne kształty. To daje intuicję, o co walczy wybór gałęzi.
Wszystkie rozwiązania: 8
Wzorzec liczbowy, pełny rachunek dla jednej pozy
Powyżej każdy krok zawierał już wzór symboliczny. Tutaj wszystkie kroki sklejone w jednym przejściu, dla konkretnej pozy celu. Liczby są stałe, można je przepisać na kalkulator/notebook i sprawdzić własną implementację linijka po linijce, w izolacji od interaktywnego playgroundu wyżej.
Poza testowa
[ 0 0 1 ]
[ 0 1 0 ]
[-1 0 0 ]Krok 1–2 · q₁ z dwóch atan2
Krok 3 · płaszczyzna ramienia
Krok 4 · q₃ z prawa cosinusów
Krok 5 · q₂ z układu 2×2
Krok 7 · q₄, q₅, q₆ z R₃⁶ (gałąź wrist=flip)
Suma · pełna konfiguracja q
Wszystkie liczby powyżej zostały wyznaczone analitycznie z wzorów wyprowadzonych w krokach 1–7. Można je odtworzyć ręcznie kalkulatorem, ten panel służy jako test kontrolny dla studenta implementującego algorytm we własnym kodzie. Stałe DH: , , , m.
Klucz przewodni, pomysły algebraiczne, nie wzory
Cała ściąga, którą zobaczysz za chwilę, to litera algorytmu, to, co trzeba wpisać do kodu. Ale za każdym wzorem stoi pomysł algebraiczny: jakaś sprytna kombinacja, która pozwala wyłuskać pojedynczą niewiadomą z układu wielu równań. Jeśli zapamiętasz pomysły, formuły zrekonstruujesz sam; jeśli zapamiętasz tylko formuły, przy pierwszym robocie o innej geometrii będziesz musiał zaczynać od zera.
| Staw | Główny pomysł | Technika algebraiczna |
|---|---|---|
| Rzut na płaszczyznę poziomą eliminuje wszystkie wyższe stawy | Dwa atan2 w różnicy, kąt do celu w XY minus kąt korygujący offset . | |
| Odległość bark↔wrist jest niezmiennikiem obrotów , zależy tylko od . | Prawo cosinusów na trójkącie bark-łokieć-wrist; jedno równanie skalarne . | |
| Po wyznaczeniu układ pozycji staje się liniowy w (). | Pogrupowanie wyrazów pozycji wg i daje układ liniowy 2×2; reguła Cramera zwraca obie wartości i atan2(s_2, c_2) dopina kąt. | |
| Mając , „brakująca" rotacja jest jawnie znana, można z niej odczytać trzy kąty Eulera. | , a następnie porównanie konkretnych elementów macierzy z postacią symboliczną iloczynu trzech rotacji wokół osi nadgarstka. |
Wspólny wzorzec: każdy staw odkrywa swój kąt dzięki jednej szczęśliwej obserwacji, która eliminuje pozostałe niewiadome. Dla tym kluczem jest niezależność rzutu poziomego od ; dla , niezmiennicza długość przekątnej; dla , liniowość po wyłuskaniu ; dla orientacji, rozkład grupowy . Te cztery obserwacje to cała architektura algorytmu; reszta to mechaniczne stosowanie atan2.
Ten sam paradygmat („szukaj kombinacji eliminującej pozostałe niewiadome") sprawdza się też w innych analitycznych IK, dla robotów UR działa równoległość trzech środkowych osi (forma B Piepera), dla robotów Stäubli, inna sekwencja offsetów. Pomysł zostaje, mechanika się zmienia.
Kompletna funkcja Python, wszystkie kroki sklejone
Wszystkie 7 snippetów Python z kroków 1–7 powyżej, połączone w jedną funkcję solve_puma560_ik(T_target). Zwraca listę do 8 rozwiązań (każde jako krotka 6 kątów), zgodnie z rozszczepieniem na gałęzie shoulder × elbow × wrist.
import numpy as np
# Parametry DH Puma560 (modified Craig):
A2, A3 = 0.4318, 0.0203
D3, D4 = 0.1500, 0.4331
D6 = 0.0
EPS = 1e-9
def solve_puma560_ik(T_target):
"""Analityczne IK dla Puma560. Zwraca listę krotek (q1..q6)."""
R = T_target[:3, :3]
p = T_target[:3, 3]
# === Krok 1: środek nadgarstka ===
p_wc = p - D6 * R[:, 2]
px_w, py_w, pz_w = p_wc
# === Krok 2: q1 (dwie gałęzie shoulder) ===
r_xy_sq = px_w**2 + py_w**2
disc_q1 = r_xy_sq - D3**2
if disc_q1 < 0:
return []
rho_abs = np.sqrt(max(0.0, disc_q1))
phi = np.arctan2(py_w, px_w)
L = np.sqrt(A3**2 + D4**2)
beta = np.arctan2(D4, A3)
solutions = []
for shoulder_sign in (+1, -1):
rho = shoulder_sign * rho_abs
q1 = phi - np.arctan2(D3, rho)
# === Krok 4: q3 (dwie gałęzie elbow) ===
K = (rho**2 + pz_w**2 - A2**2 - A3**2 - D4**2) / (2 * A2)
disc = L**2 - K**2
if disc < 0:
continue
sqrt_d = np.sqrt(disc)
for elbow_sign in (+1, -1):
q3 = np.arctan2(elbow_sign * sqrt_d, K) - beta
# === Krok 5: q2 (układ 2x2 → atan2) ===
c3, s3 = np.cos(q3), np.sin(q3)
M = A2 + A3 * c3 - D4 * s3
N = A3 * s3 + D4 * c3
denom = M**2 + N**2
c2 = (M * rho - N * pz_w) / denom
s2 = (-M * pz_w - N * rho) / denom
q2 = np.arctan2(s2, c2)
# === Krok 6: R36 = R03.T @ R ===
c1, s1 = np.cos(q1), np.sin(q1)
c23, s23 = np.cos(q2 + q3), np.sin(q2 + q3)
R03 = np.array([
[ c1*c23, -c1*s23, -s1],
[ s1*c23, -s1*s23, c1],
[-s23, -c23, 0],
])
R36 = R03.T @ R
# === Krok 7: q4, q5, q6 (dwie gałęzie wrist + singularność) ===
sq5_abs = np.hypot(R36[1, 0], R36[1, 1])
if sq5_abs < EPS:
q5 = np.arctan2(0.0, R36[1, 2])
q4 = 0.0
q6 = np.arctan2(-R36[0, 1], R36[0, 0])
solutions.append((q1, q2, q3, q4, q5, q6))
else:
for wrist_sign in (+1, -1):
q5 = np.arctan2( wrist_sign * sq5_abs, R36[1, 2])
q4 = np.arctan2( wrist_sign * R36[2, 2], -wrist_sign * R36[0, 2])
q6 = np.arctan2(-wrist_sign * R36[1, 1], wrist_sign * R36[1, 0])
solutions.append((q1, q2, q3, q4, q5, q6))
return solutions
# Weryfikacja: forward kinematics * inverse = identity
if __name__ == "__main__":
from numpy.testing import assert_allclose
# załóż że masz forward_kinematics(q) → T 4×4
q_true = np.array([0.3, -1.2, 1.6, 0.4, 0.5, -0.6])
T = forward_kinematics(q_true) # noqa: F821
sols = solve_puma560_ik(T)
dists = [np.linalg.norm(np.array(s) - q_true) for s in sols]
print(f"#solutions = {len(sols)}, best |q - q*| = {min(dists):.2e}")
# → #solutions = 8, best |q - q*| ≈ 1e-15 (precyzja maszynowa)Ile to linii: ~70 linii czystego kodu, plus ~15 linii parametrów i weryfikacji. Cała aplikacja przemysłowa IK Pumy mieści się w jednym pliku, który czytasz w 5 minut, to jest właśnie wartość zamkniętego rozwiązania względem metod iteracyjnych.
Ściąga formuł
Wszystkie kluczowe wzory algorytmu IK Pumy 560 zebrane w jednym miejscu, przydatne jako kompaktowa referencja przy implementacji albo powtórce przed egzaminem.
Wybór znaków w trzech miejscach (, dyskryminant , ) generuje kombinacji. Część może odpaść jako poza zasięgiem () lub poza limitami przegubów; w singularności nadgarstka () gałęzie wrist zlewają się.
- Zapomnienie drugiego członu w q₁:
atan2(p_y, p_x)bez− atan2(d₃, ρ)daje błąd ~7° wynikający z odsadzenia . - Użycie
arcsinlubarccostam gdzie wystarczaatan2, gubi informację o ćwiartce, błąd zniknie tylko dla niektórych pozycji. - Mieszanie konwencji DH klasycznej i Craiga, liczby są te same, ale przesunięte o jeden indeks. Wzory w tym walkthrough zakładają Craiga.
- Numeryczna inwersja zamiast transpozycji, kosztownie i z gorszą precyzją. Macierze rotacji są ortogonalne: .
- Brak detekcji singularności przed dzieleniem, kończy się wartościami NaN dla q₄ i q₆.
Osobliwości (singularności) w jednym miejscu
W poprzednich krokach kilkukrotnie wspominaliśmy konfiguracje, w których algorytm staje wobec sytuacji nietypowej, osobliwości (w literaturze angielskojęzycznej i wielu polskich tłumaczeniach: singularności). Nie są to błędy algorytmu, tylko miejsca w przestrzeni konfiguracyjnej, w których manipulator fizycznie traci jeden stopień swobody (kierunek, w którym nie może już poruszyć narzędziem, bez zmiany położenia paru przegubów na raz). Algebraicznie objawiają się one tym, że formuła traci jednoznaczność: układ równań ma albo nieskończenie wiele rozwiązań, albo nie ma żadnego.
| Typ osobliwości | Warunek matematyczny | Co się dzieje fizycznie | Konsekwencja dla IK |
|---|---|---|---|
| Osobliwość osi 1 (nad bazą) | (cel na granicy „cylindra zakazanego") | TCP znajduje się dokładnie nad pionową osią bazy, obrót wokół tej osi nie zmienia położenia TCP. | staje się nieokreślony (każdy kąt jest równie dobry). Numerycznie pojawia się atan2(0, 0), które Python zwraca jako 0, to arbitralny wybór, nie poprawne rozwiązanie. |
| Osobliwość łokcia, wewnętrzna | , czyli , przekątna bark↔wrist osiąga ekstremum. | Ramię jest maksymalnie wyprostowane () lub maksymalnie zgięte (). Trójkąt bark-łokieć-wrist degeneruje się do odcinka. | Dyskryminant , dwie gałęzie elbow up i elbow down zlewają się w jedno rozwiązanie. Algorytm zwróci konkretną liczbę, ale „rezerwa" manewrowa łokcia spadła do zera. |
| Osobliwość łokcia, zewnętrzna (poza zasięgiem) | Cel leży poza fizycznym zasięgiem ramienia, trójkąt o bokach nie spełnia nierówności trójkąta (suma dwóch krótszych boków jest mniejsza od trzeciego). | → wyjątek numeryczny. Trzeba albo odrzucić pozę celu, albo wybrać drugą gałąź barku (czasem cel jest osiągalny tylko z drugiej strony manipulatora). | |
| Osobliwość nadgarstka (gimbal lock) | , czyli . | Osie i stają się współliniowe (oba są tą samą prostą), obrót wokół jednej jest nieodróżnialny od obrotu wokół drugiej. Klasyczna blokada Eulera/Cardano. | Tylko suma (przy ) lub różnica (przy ) jest wyznaczona; sam i mają nieskończenie wiele par. Trzeba przyjąć umowę (np. ) i dopasować do reszty. |
Wspólny mianownik wszystkich czterech przypadków: dwie kolumny Jakobianu stają się liniowo zależne, więc wyznacznik . Geometrycznie znaczy to, że istnieje kierunek w przestrzeni (kierunek prędkości efektora), w którym żadna kombinacja nie potrafi przesunąć końcówki, manipulator traci jeden stopień swobody w tym kierunku. Dokładniejszą analizą zajmuje się moduł 7; tutaj wystarczy zapamiętać, że nasz solver analityczny nie zawodzi numerycznie w osobliwościach (poza zewnętrzną łokcia, gdzie cel jest fizycznie nieosiągalny), zwraca konkretne liczby, ale są to liczby arbitralne w obrębie nieskończonej rodziny rozwiązań i nie należy ich traktować jako „tej jedynej poprawnej" konfiguracji.
Ten sam solver, dwa języki
Cały walkthrough jest realizowany w TypeScript (natywnie w przeglądarce). Poniżej ten sam algorytm, linijka po linijce przeniesiony do Pythona, uruchamiamy przez Pyodide w osobnym web workerze. Oba środowiska startują z identycznej pozy docelowej i powinny zwrócić identyczny zbiór rozwiązań, z różnicą nie większą niż precyzja arytmetyki zmiennoprzecinkowej (~10⁻¹⁵). Pyodide jest ładowany leniwie, pierwsze uruchomienie zajmie kilka sekund (pobranie ~10 MB runtime).
Porównanie uruchomień: TypeScript vs Python
Python runtime (Pyodide) uruchamiany jest w web workerze i wymaga jednorazowego pobrania ~10 MB zasobów. Kliknij, by go zainicjować.
TypeScript (natywnie)
Python 3.12 (Pyodide + NumPy)
Co dalej
W module 2 bierzemy tę samą matematykę i przenosimy ją w tryb interaktywnego eksperymentu: wszystkie 8 rozwiązań jednocześnie na jednej scenie, sterowanie gałęziami checkboxami, animacja trajektorii pokazująca, jak gałęzie „znikają" przy przekraczaniu granic osiągalności. Moduły 3 i 4 pokazują alternatywne strategie rozwiązania, numeryczne (Jakobian, optymalizacja), które są wolniejsze i mniej dokładne, ale za to uniwersalne: nie wymagają ręcznego wyprowadzania wzorów dla każdej rodziny robotów i działają dla dowolnej geometrii (także tych, dla których zamknięta forma byłaby trudna do wyprowadzenia).
Mając już z IK, kolejny naturalny krok to: różniczkowanie po czasie i pytanie o moment napędowy w przegubach. Tym zajmuje się moduł 9 (Dynamika odwrotna), algorytm Newton-Euler na trajektorii (q, q̇, q̈) → siły i momenty napędowe τ. Następnie moduł 10 dodaje model elektromechaniczny silnika DC i przekładni harmonicznej, prowadząc do energii cyklu transportowego.